長岡技術科学大学 宮崎研究室
研究室の紹介
宮崎研究室ではメカトロニクス関連の研究を主に行っています。メカトロニクスとは機械要素(メカニクス)と電気要素(エレクトロニクス)が融合しているものであり,制御工学の分野になります。
たとえばロボットアームならアーム部の運動は機械要素の解析が必要で,それを動かすモータには電気要素の解析が必要,ということです。
そんな電気も機械も両方勉強できる(しなければならない)のが我が宮崎研究室です。
研究テーマ
-
二関節筋を再現したロボットアームの位置および力制御
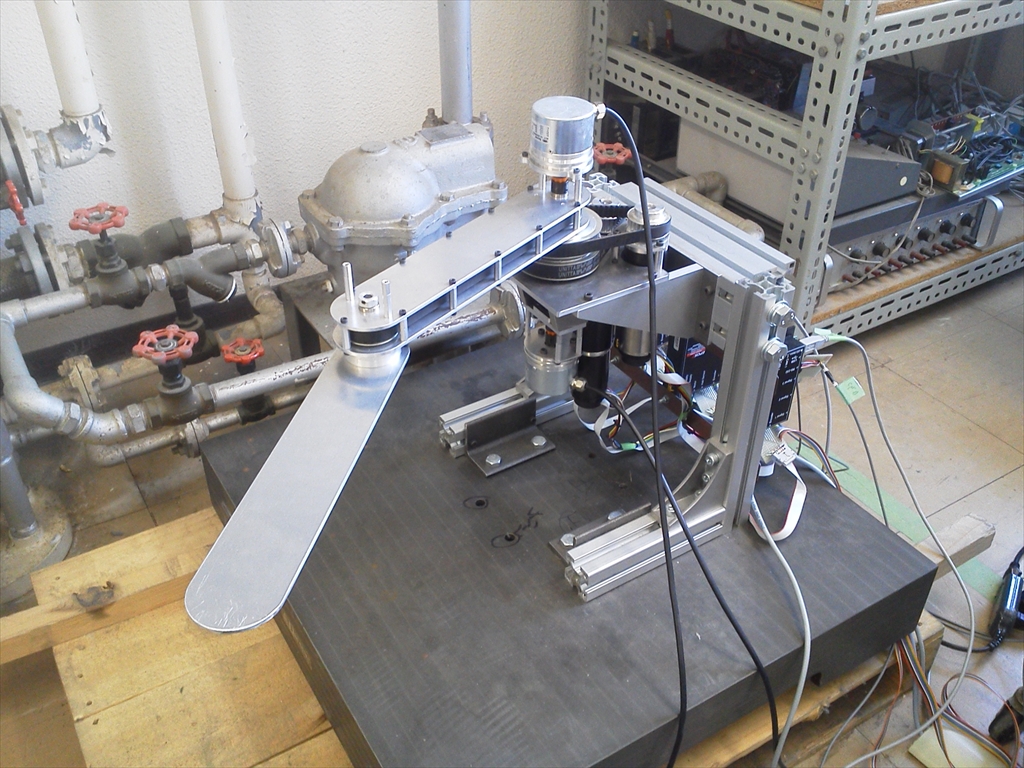 二関節筋を再現したロボットアーム
二関節筋を再現したロボットアーム
人間の腕や足には二関節筋と呼ばれる二つの関節を同時に動作させる筋肉があります。 この筋肉があるおかげで人は手先や足先に発生する力を制御することが出来ています。 この二関節筋をロボットアームで再現することで人間と同じような力制御を目指しています。 写真のアームは二関節筋を再現するために3つのモータで2関節を動作させます。 そのため従来のアームの制御法では制御が困難になり,二関節筋を再現したロボットアーム用の新しい制御法が必要になっています。
-
FB補償器の出力を用いたFF補償器の設計に関する研究

制御理論において、モータの速度制御は以前からフィードバック(FB)補償器を用いて行われています。 フィードバック補償器からモータを駆動するVVVFインバータに対して出力される信号波形からモータの粘性摩擦係数や慣性モーメントを推定できます。 推定した値により、フィードフォアード(FF)補償器を設計することができます。 この設計したフィードフォアード補償器をフィードバック制御系に加えることで指令値に対する応答性はフィードバック制御より改善されます。 このモータのパラメータをフィードバック系出力から推定する推定器などの設計が必要となっています。
-
手押し式二輪車の不整地走行制御
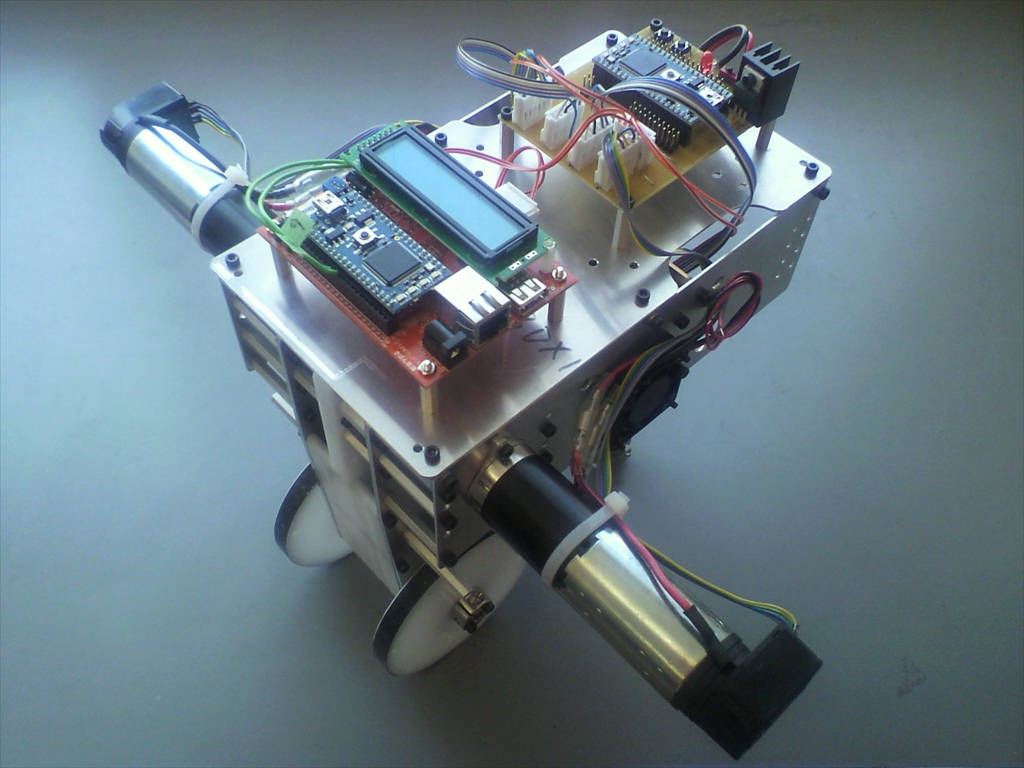 手押し式二輪車の試作機
手押し式二輪車の試作機
現在使用されている手押し式の耕耘機は素人が直進動作させることが難しく、又、エンジン動作なので制御することが難しい上にメンテンナンスが大変です。 そこでエンジンをモータに置き換えることでメンテンナンス性・制御性を向上させ、制御を行うことで誰でも簡単かつ正確な動作を行えるようにします。 写真の装置は二輪車の制御実験用ミニモデルで取手・タイヤなどの部品を換装することで自立二輪車・手押し二輪車などの制御実験を行うことができます。 今後、土を敷いた不整地での実験環境を構成し、土の上での制御実験を行う予定です。 また、1:1スケールの実機も製作予定です。
-
脚先端の位置・力制御を併用する四脚歩行ロボットの不整地歩行制御
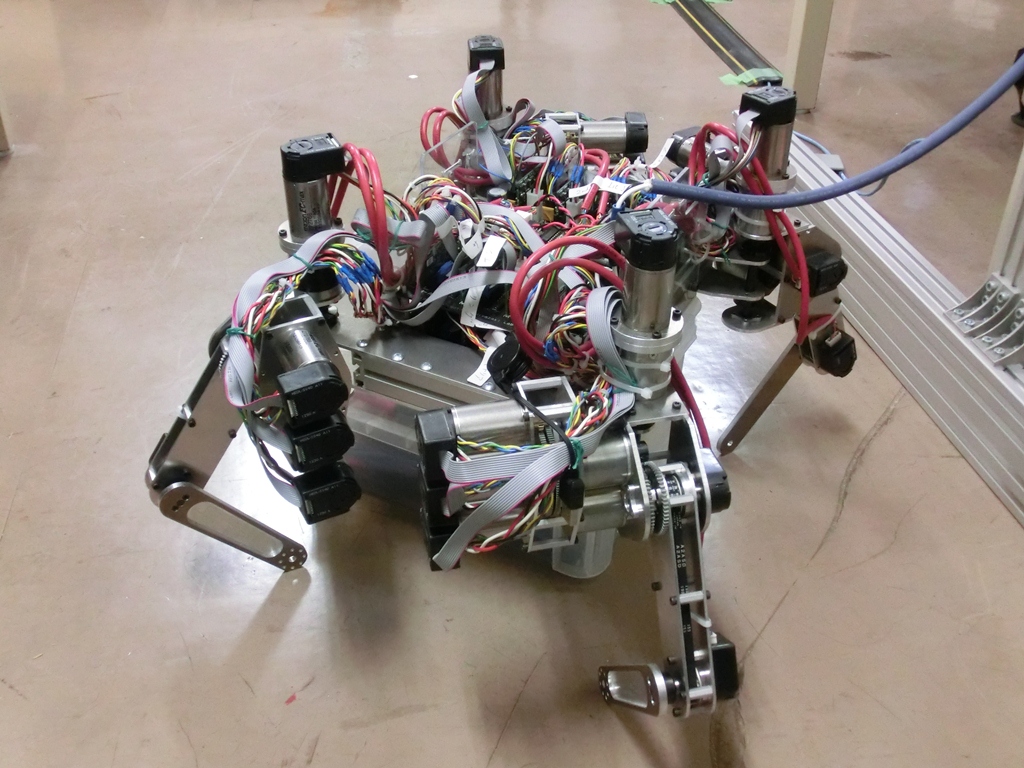 二関節筋を持つ四脚歩行ロボット
二関節筋を持つ四脚歩行ロボット
四脚歩行ロボットが不整地を歩行する際には脚先端の位置だけでなく力も重要な要素となります。 しかし、従来の関節構造のロボットでは脚先端の位置・力制御は容易ではなく、複雑な制御が必要となります。 そのため制御軸数の多い歩行ロボットへの実装は容易ではありません。 そこで、人間や動物の筋構造において力の制御等に重要な役割を持つ二関節筋を遊星歯車機構によって再現し、ロボットの機構に適用しました。 この二関節筋機構を適切に制御することによって脚先端の位置・力制御を実現し、四脚歩行ロボットの不整地歩行制御を実現することを目的としています。
-
分散型電源システムに要する多方向コンバータ
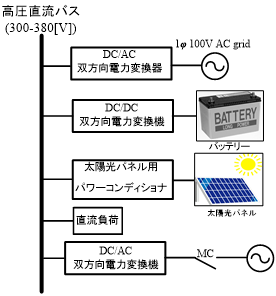 多方向コンバータ
多方向コンバータ
近年は環境保全などの観点から,太陽光発電や風力発電などの再生可能エネルギーの利用が活発化しています。 再生可能エネルギーを用いる際のシステムとして「マイクログリッド」や「分散型電源」などが提唱されており、注目が高まっています。 それらシステムでは相互に電力を融通する必要性から多方向に電力を送ることが可能なコンバータが必要となります。 そのため、多方向の絶縁型DCDCコンバータを、回路シミュレータPSIMを用いてシミュレーションや 解析を行いながら、 実機を作製して理論を確かめています。
- 二関節筋を持つ二足歩行ロボットの歩行安定化制御に関する研究
- 非接触給電システムを有する4輪走行車両の運動制御
- 電気推進船の揺れ制御装置
- メカトロニクス用小型,多機能なモータドライバの設計・製作